

")
")
BRTV09WDS5P0
Introducción del producto
Un manipulador que puede sacar el producto terminado y el cabezal del material y colocarlo en el extremo trasero de la máquina de inyección, lo que puede ahorrar espacio de instalación de la máquina y tiene una gran capacidad antiinterferente.
Parámetro del producto (especificación)
Modelo | Recomendadol.MM(ton) | Carrera transversal (mm) | Carrera vertical (mm) | Carga máxima (kg) | Peso neto / kg) | Carrera transversal (mm) |
BRTV09WDS5P0 | 120T-320T | P:550 R:500 | 900 | 8 | Estar determinado | La longitud total del arco transversal es de 6 metros. |
Característica y aplicación del producto.
El producto es aplicable a todo tipo de máquinas de inyección horizontales de 120T-320T para productos para llevar y bebederos. Es especialmente adecuado para sacar moldes de inyección como cuerdas de nailon, tiendas de campaña, maletas, bolsos, ruedas para sillas, paraguas, etc.
Aspecto y descripción del panel de operación del manipulador.

CAMBIAR
El estado del controlador se divide en tres tipos: manual, parada y automático.
【Manual】:Gire el interruptor de selección de estado hacia la izquierda para ingresar al estado manual
【Detener】: Gire el interruptor de selección de estado hacia el medio para ingresar al estado de parada, en este estado puede configurar los parámetros.
【Automático】: Gire el interruptor de selección de estado hacia la derecha para ingresar al estado automático, en este estado puede haber configuraciones completamente automáticas y correspondientes.
FUNCIÓN DEL BOTÓN
【Comenzar】botón:
Función 1: Presione el botón "Inicio" en el estado automático, el robot entrará en el estado de funcionamiento automático;
Función 2: en el estado detenido, primero presione "origen" y luego "iniciar" para construir el robot y encontrar el origen;
Función 3: En el estado de parada, primero presione la tecla "Regresar" y luego "Iniciar" para construir el robot para realizar la operación de regreso al origen.
【Detener】botón:
Función 1: En estado completamente automático, presione esta tecla, el programa se detendrá después de que se ejecute el módulo.
Función 2: Cuando ocurre una alarma, presione esta tecla en el estado de parada para borrar la pantalla de alarma resuelta.
【OrigenBotón 】: Solo se utiliza para la operación de referencia, consulte la sección 2.2.3, método de referencia.
【DevolverBotón 】: Presione la tecla [Regresar] y luego presione la tecla [Inicio]. Todos los ejes siguen la secuencia Y1,Y2 → Z,XI,X2, Y1 e Y2 regresan a la posición origen, y los ejes Z, X1 y X2 regresan al punto inicial del programa.
【Velocidad+/Velocidad-Botón 】: Estos dos botones se pueden utilizar para ajustar la velocidad global en manual y automático.
【Boton de emergencia】 :Presionar el botón de parada de emergencia en caso de emergencia cortará la habilitación de todos los ejes. El sistema emite una alarma de "parada de emergencia". Después de girar la perilla, presione la tecla [Detener] para borrar la alarma.
BOTÓN DE AJUSTE
Función: Cuando la posición manual se ajusta con precisión, puede utilizar esta perilla para mover el eje con precisión.
Método de operación: haga clic , haga clic para seleccionar la opción [Selección del volante], seleccione la velocidad del volante, seleccione el eje que desea ajustar o presione el botón del eje (en el controlador manual) que desea ajustar y luego gire el perilla de ajuste fino para hacer que el eje se mueva hasta el punto objetivo poco a poco.
, haga clic para seleccionar la opción [Selección del volante], seleccione la velocidad del volante, seleccione el eje que desea ajustar o presione el botón del eje (en el controlador manual) que desea ajustar y luego gire el perilla de ajuste fino para hacer que el eje se mueva hasta el punto objetivo poco a poco.
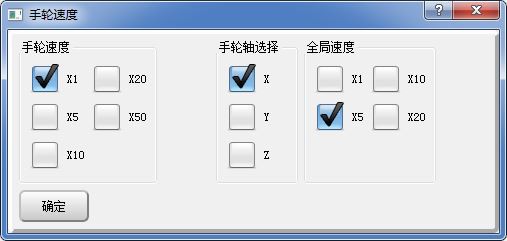
Descripción de la velocidad del volante:
X1: Mueva un eje de la cuadrícula para trasladarlo 0.01 mm o gire el eje 0,01 grados.
X5: mueva un eje de cuadrícula para trasladar 0.05 mm o gire el eje 0,05 grados.
X10: mueve un eje de cuadrícula para trasladar 0.1 mm o gira el eje 0,1 grados.
X20: mueve la cuadrícula 0.2 mm o el eje 0,2 grados.
X50: mueve un eje de cuadrícula para trasladar 0.5 mm o gira el eje 0,5 grados.
Etiqueta: robot de haz transversal, China, proveedores, fabricantes, fábrica, personalizado, venta al por mayor, brazo, marcas, aplicaciones, precio bajo, compra con descuento, en venta